今回は、アセンブリの実践編です。Fusion 360のアセンブリ機能を使ってロボットアームを作成します。アセンブリは作成したコンポーネントを自由に動かせる面白い機能なので、ぜひ挑戦してみてください。
はじめに
今回は、「スタンフォードマニピュレータ」と呼ばれるマニピュレータを参考にロボットアームを作ります。マニピュレータとは、人間の手と似た動作する装置の総称です。スタンフォードマニピュレータは5つの回転関節と、ひとつの直動関節から成り立つロボットマニピュレータです。これらの関節をジョイントの「回転」や「スライダ」を使って再現してみましょう。
この記事はアセンブリを使って実際に動かすことがメインなので細かい説明は省略します。基礎から確認したい方はこちらの記事もあわせてご覧ください。
作成したコンポーネントを組み立てよう
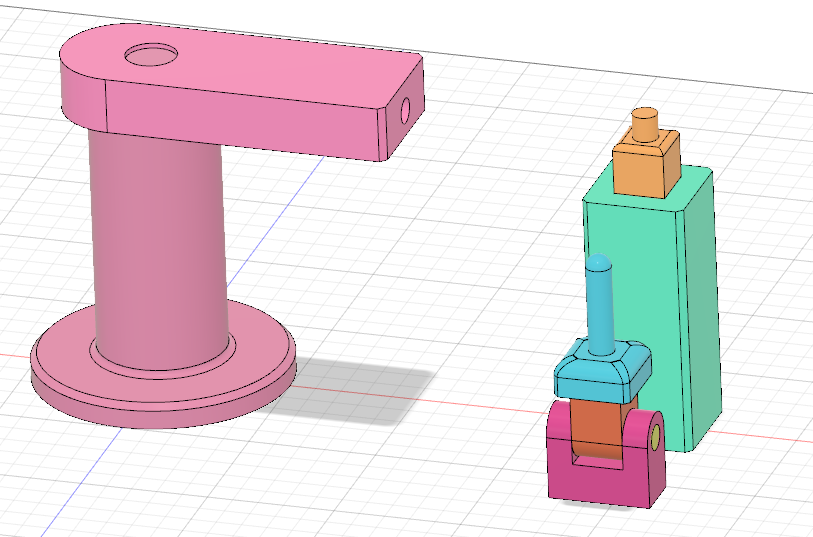
はじめに、作成したコンポーネント(部品)を組み立てましょう。今回は、以下に示したコンポーネントを用意しました。「ジョイント」→「新規コンポーネント」を使って、ボディからコンポーネントを作成可能です。
「検査」→「コンポーネントのカラーサイクルの入れ替え」を使えば、下に示したようにコンポーネントごとに色を振り分けられます。コンポーネントが見やすくなるので、必要に応じて使ってみましょう。
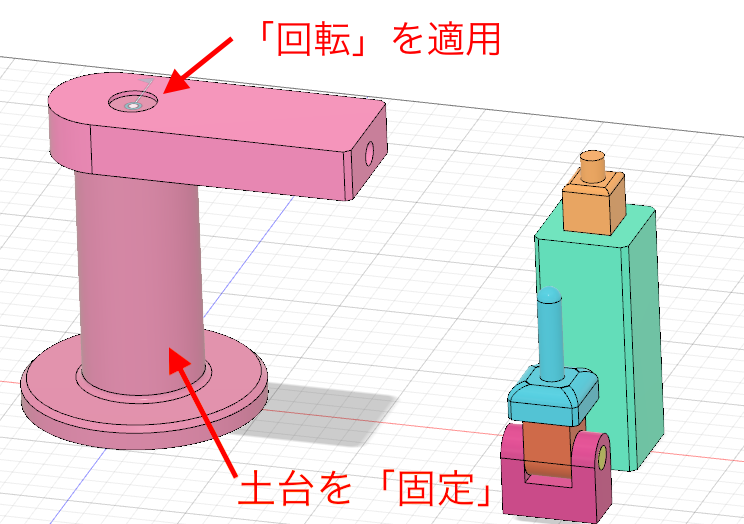
まず、「位置固定ジョイント」を用いてひとつ目の関節に「回転」を適用します。アセンブリには「ジョイント」と「位置固定ジョイント」の2種類がありますが、コンポーネント同士があらかじめ組み合わさっている場合には「位置固定ジョイント」を使います。
実際に動かす前に、土台部分を固定しておくのを忘れないようにしましょう。右側に表示されているコンポーネントを右クリックし、「固定」を選択してコンポーネントを固定可能です。
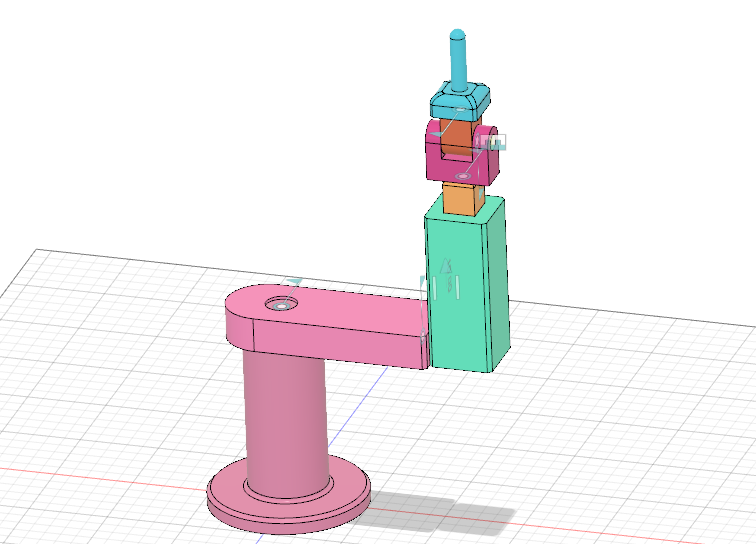
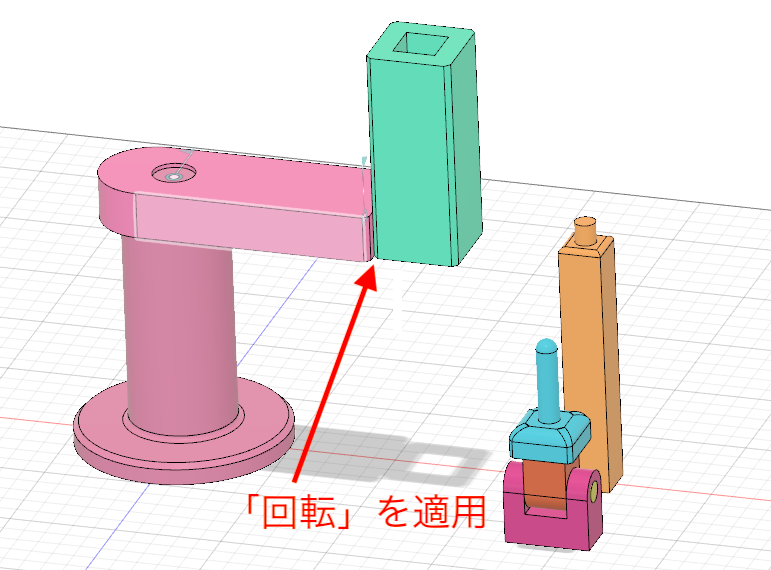
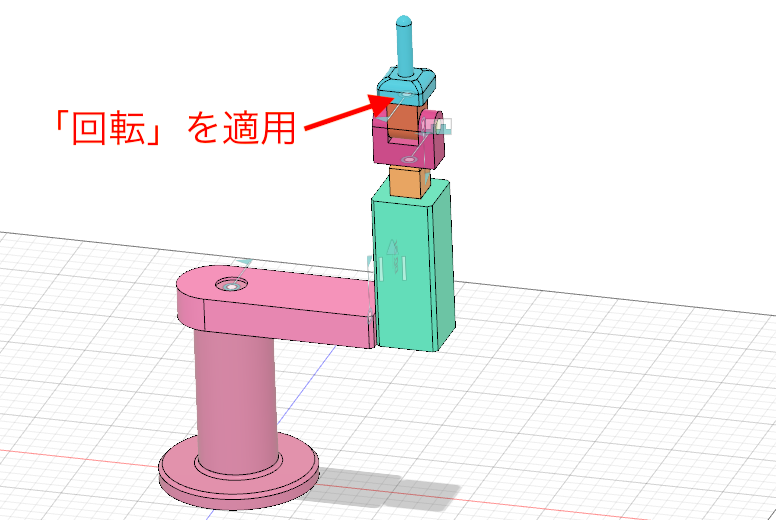
続いて、「ジョイント」を用いてふたつ目の関節に「回転」を適用します。
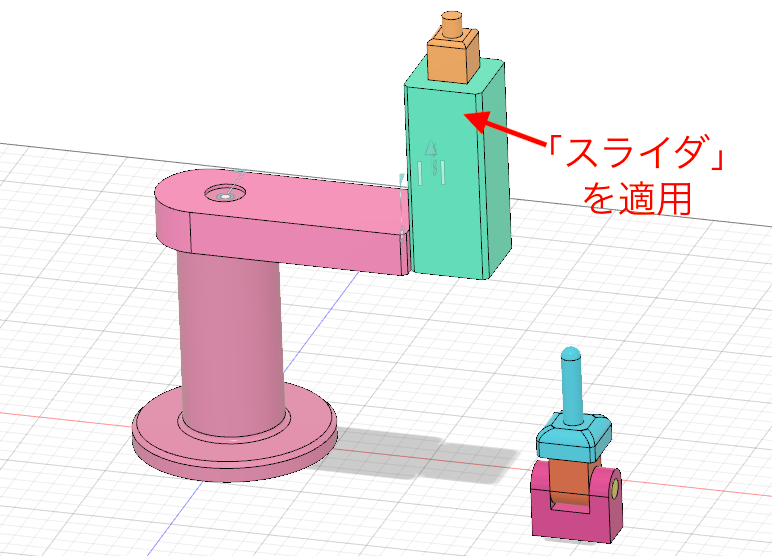
次に、「スライダ」を使って直動関節を作ります。「アセンブリ」→「ジョイント」から、筒の部分に「スライダ」を適用します。
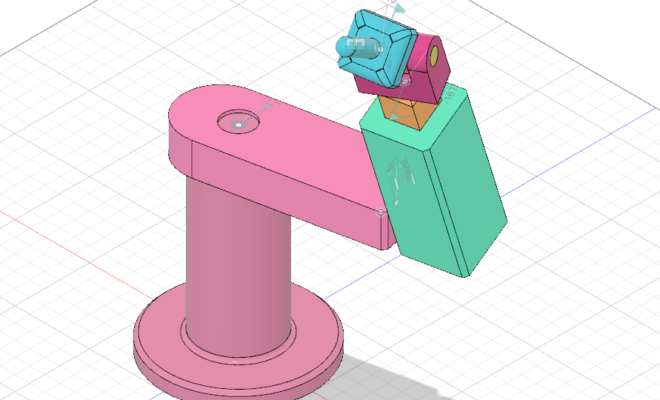
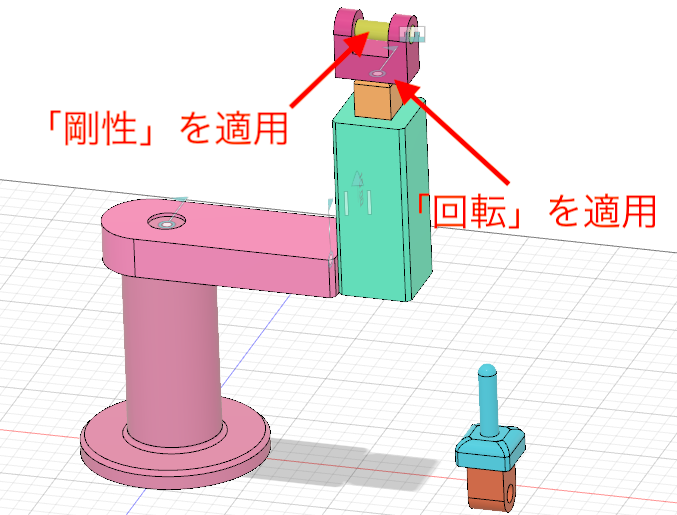
最後に、アームの先端部分を組み立てます。まず、「アセンブリ」→「ジョイント」選択。ひとつ目の関節に「回転」を、軸のパーツ(黄色)に「剛性」を適用します。
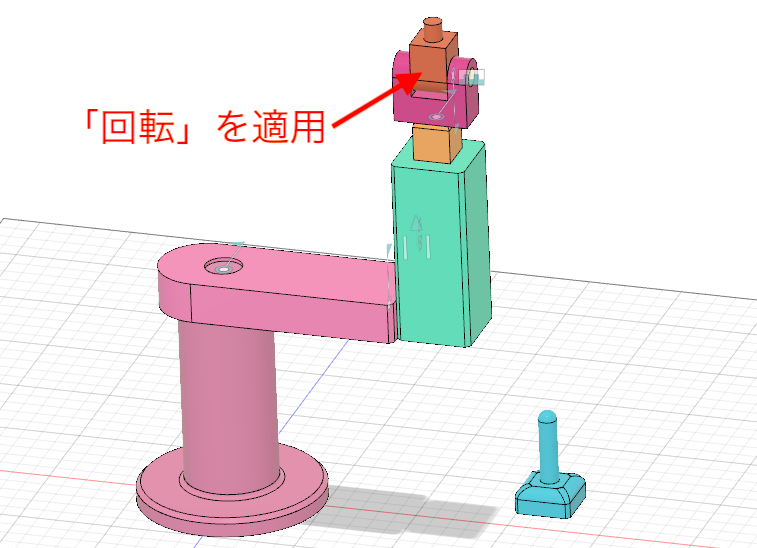
残りの2パーツも同様に、「回転」を適用しましょう。
ジョイントの可動域を設定しよう
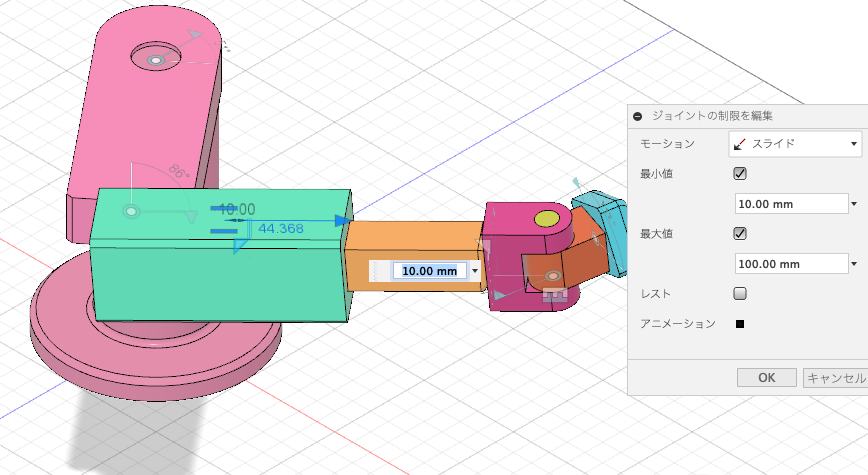
コンポーネントの組み立てが完了したので、ジョイントの可動域を設定しましょう。はじめに、「スライダ」部分に可動域を設定します。
左側に表示されているジョイントを右クリックし、「ジョイントの制限を編集」を選択。今回は、最小値を「10 mm」、最大値を「100 mm」としました。ジョイントの設定方法によっては各値は異なる場合がありますが、その時は適切な値を設定しましょう。
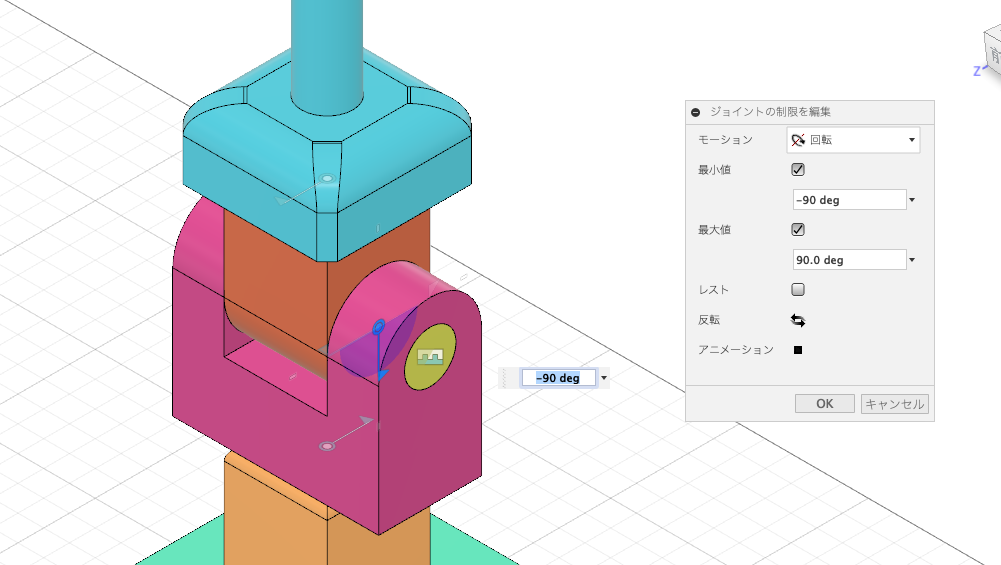
次に、アーム先端部分の回転関節(赤色のパーツ)の可動域を設定します。コンポーネント同士が干渉しないように、最小値を「-90 deg」、最大値を「90 deg」としました。
「アセンブリ」→「接触セットを有効化」を使えば、すべてのコンポーネントが干渉しないように動かすことが可能です。編集すべきジョイントが多い場合には使用するのも良いでしょう。
モーションスタディを使って動かしてみよう
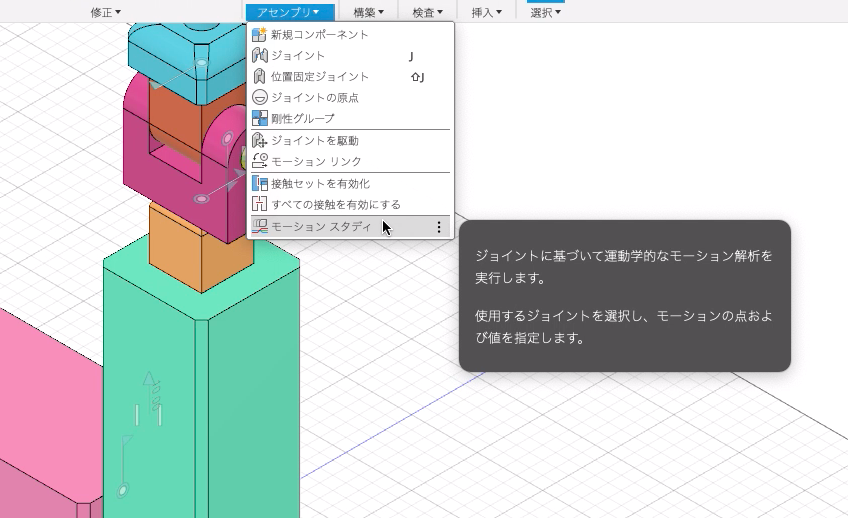
動かすための準備が完了したので、実際にロボットアームを動かしましょう。マウスを使って自由に動かせますが、今回は「モーションスタディ」で自動で動かします。「アセンブリ」→「モーションスタディ」からモーションスタディを実行可能です。
「モーションスタディ」を選択すると、画面右下に新しくウィンドウが表示されます。本来は、右下に小さく表示されますが、今回は見やすくするために拡大して表示しました。
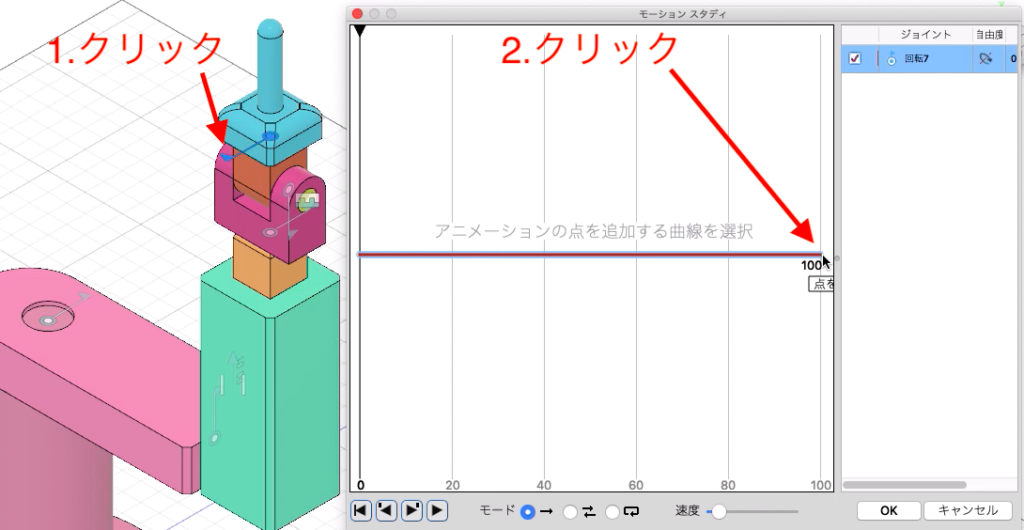
はじめに、動かしたいジョイントをクリック。クリックするとグラフに直線が追加されるので、今回は横軸が「100」のポイントを選択しましょう。グラフの横軸はステップ数を、縦軸は角度や移動距離を示しています。
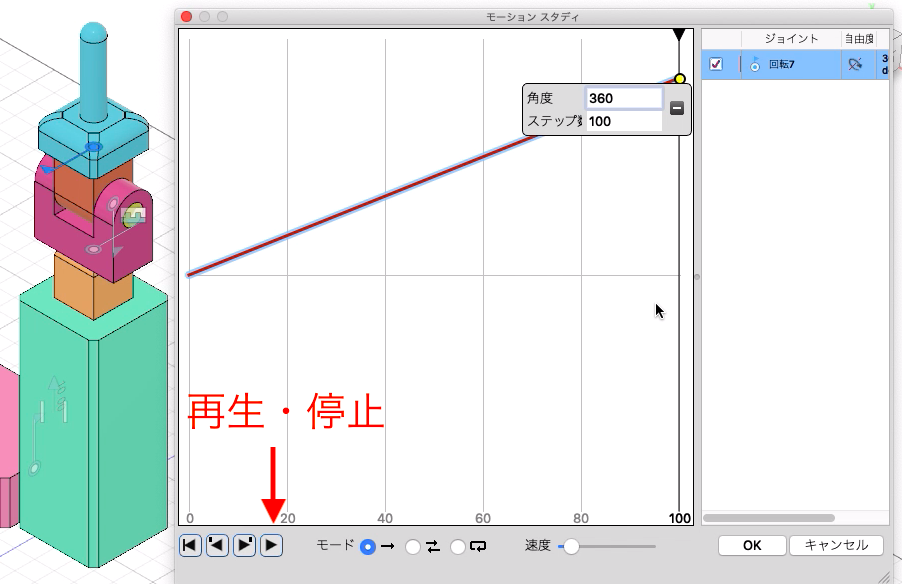
次に、ステップ数「100」のポイントの角度「360 deg」を入力。入力が完了すると、傾きをもった直線が描かれ、その直線が示すようにコンポーネントが回転します。
また、ウィンドウ左下から「再生・停止」や「ステップ数を増加」を実行可能です。「モード」では、「1度のみ再生」や「繰り返し再生」など再生方法を設定でき、「速度」から再生速度を変更できます。
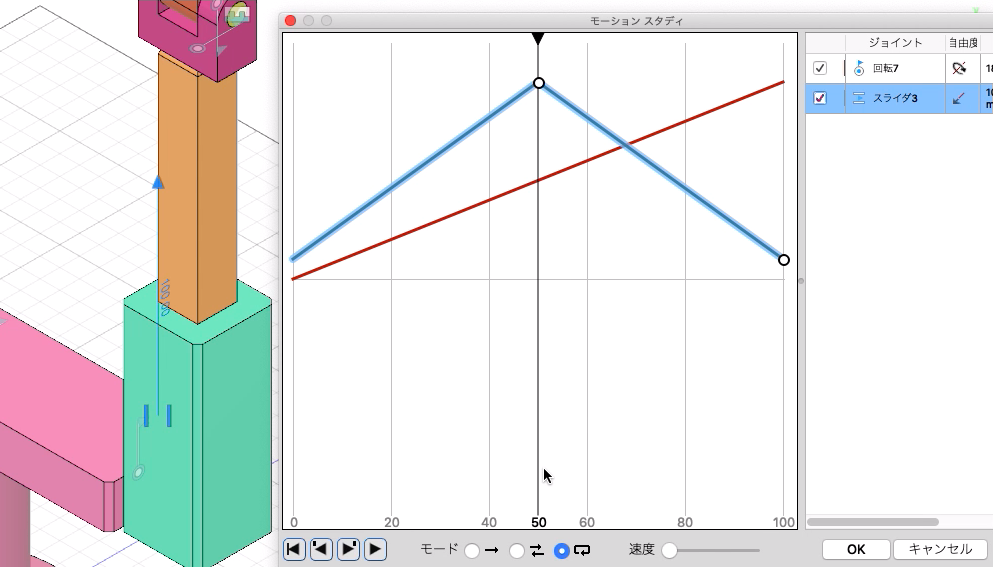
「スライダ」のジョイント部分も動かしてみましょう。今回はステップ数「50」のポイントに距離「100」を入力しました。これで「スライダ」の部分が連続的に上下に動くようになりました。
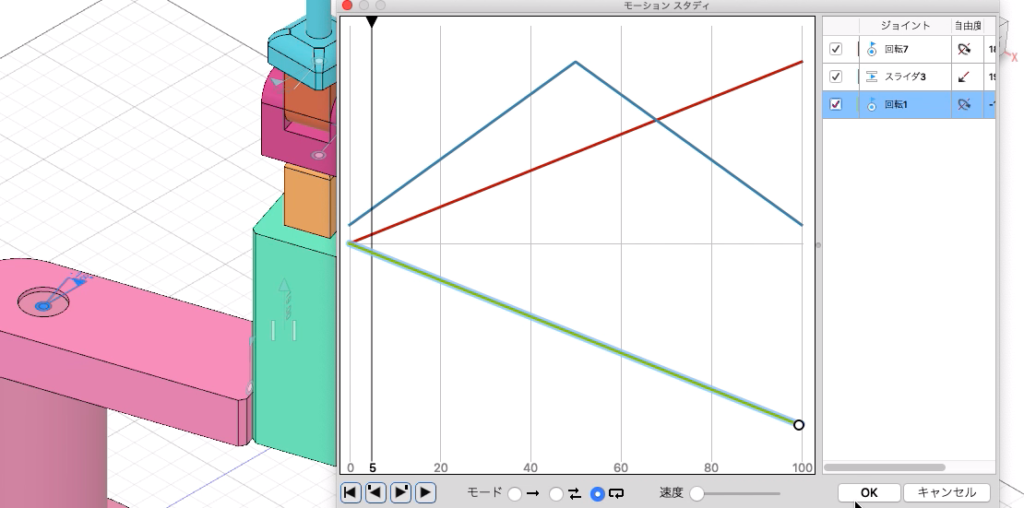
その他のジョイントにも同様にして動かせます。ポイントを追加すればさらに複雑なモーションを実行可能です。必要に応じてモーションを追加し動かしてみてください。
おわりに
最後までご覧いただきありがとうございます。アセンブリはコンポーネントを自由に動かせる面白い機能です。アセンブリを使えば、今回紹介したロボットアームの他にも、様々な機構を作成できるので、モデリングの幅も広がります。