アセンブリを用いれば、部品(コンポーネント)同士を組み合わせ、指定した通りに作成したボディを動かせます。操作がやや複雑なので、Fusion 360を使い始めたばかりの頃は敬遠されがちなコマンドですが、実際に使ってみると、面白いコマンドなのでぜひ挑戦してみてください。
7つのモーションタイプを理解しよう
はじめに、アセンブリを使用する際に必要となるモーションタイプを理解しましょう。Fusion 360のアセンブリには7つのモーションタイプがあります。これらのモーションタイプについて簡単にまとめました。
①剛性
コンポーネント同士を動かないように固定。
②回転
コンポーネントが指定した軸で回転。
③スライダ
コンポーネントが指定した軸方向に平行移動。
④円柱状
コンポーネントが指定した軸で回転し、軸方向に平行移動。
⑤ピン-スロット
コンポーネントが指定した軸方向に平行移動。また、異なる軸周りに回転。
⑥平面
コンポーネントが指定した平面を自由に移動。2軸の移動と1軸の回転自由度をもちます。
⑦ボール
コンポーネントが指定したポイントで自由に回転。
アセンブリを始める前に
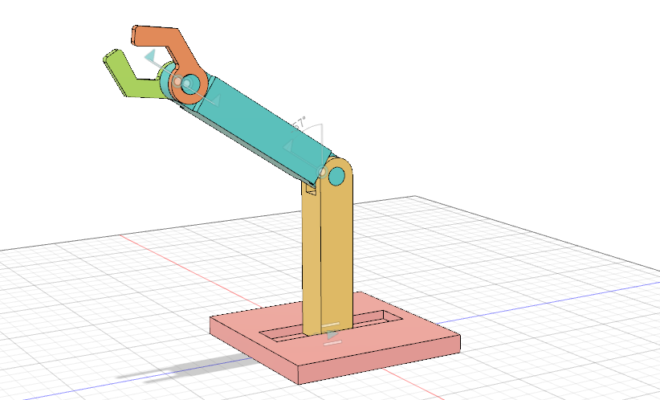
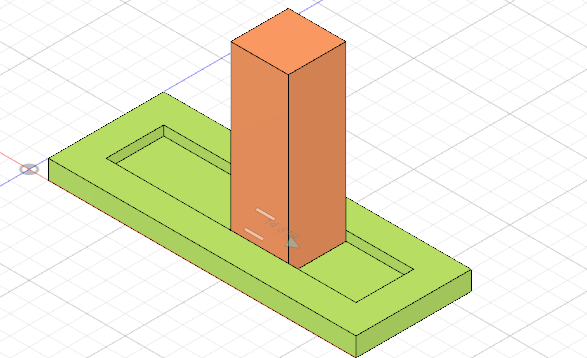
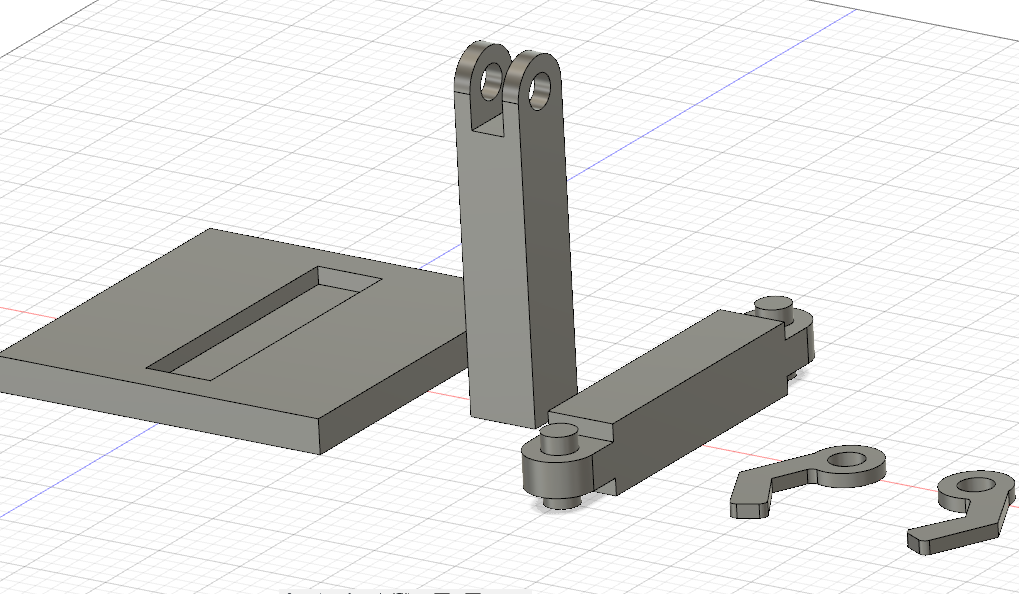
アセンブリを始める前に、実際に動かすためのボディを用意します。今回は下の写真に示したボディを利用して簡単なロボットアームを作成します。「押し出し」や「切り取り」を使えば簡単に作成できるので、一緒に手を動かして学びたい方は挑戦してみてください。
ボディからコンポーネントを作成しよう
アセンブリでパーツを動かすためには、ボディからコンポーネントを作成する必要があります。まず、「アセンブリ」→「新規コンポーネント」を選択。「ボディから」にチェックを入れ、コンポーネントに変換する5つのボディをすべて選択します。5つすべて選択したら、OKをクリックすればコンポーネントの作成完了です。
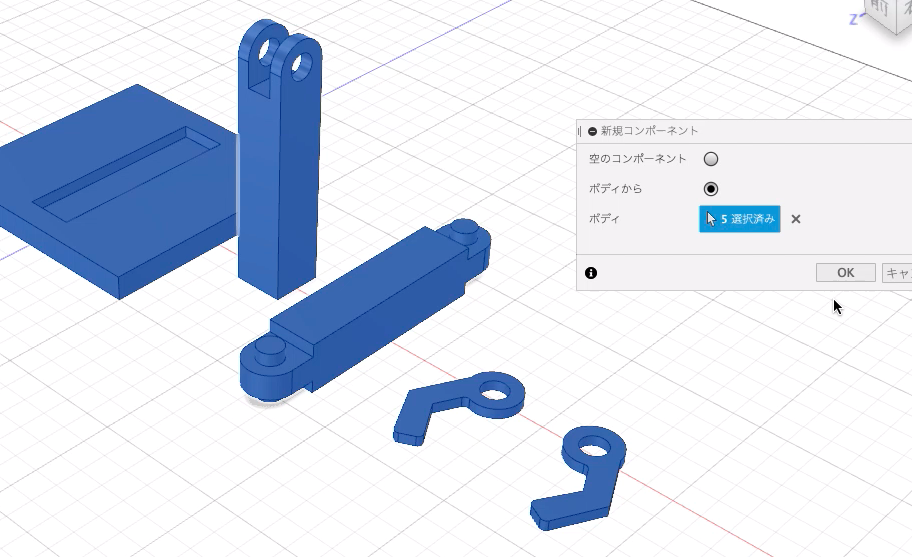
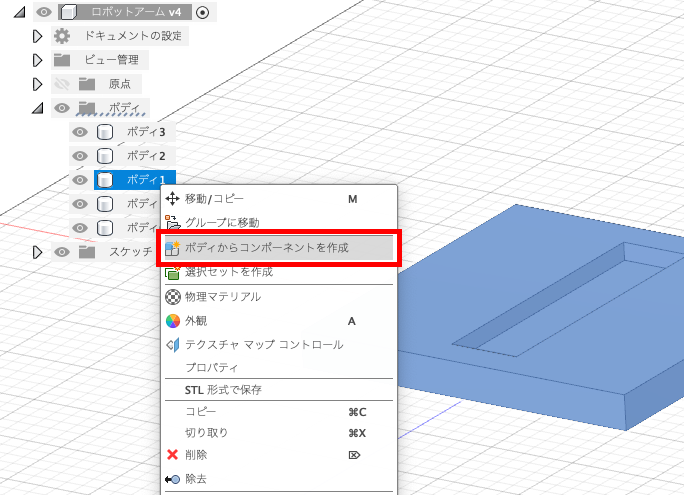
また、別の方法でもボディからコンポーネントを作成可能です。左側にある「ボディ」から「ボディ名」を右クリックし、「ボディからコンポーネントを作成」をクリックすれば、選択したボディからコンポーネントを作成できます。どちらの方法も機能は同じなので使いやすい方を選びましょう。
「スライダ」で土台とアームを繫げよう
準備が完了したのでアセンブリを使って簡単なロボットアームを組み立てましょう。ジョイントを利用してコンポーネントを動かすためには、必ず1箇所は空間上に固定しておかなくてはいけないので、今回は土台となるコンポーネントを固定しておきます。
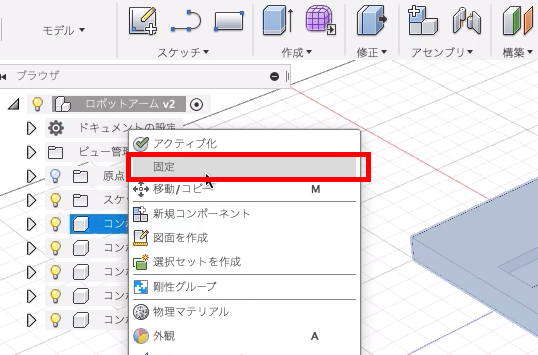
まず、左側にあるコンポーネントから、土台となるコンポーネントを選択し、右クリック。「固定」をクリックすれば、コンポーネントが空間上に固定されます。
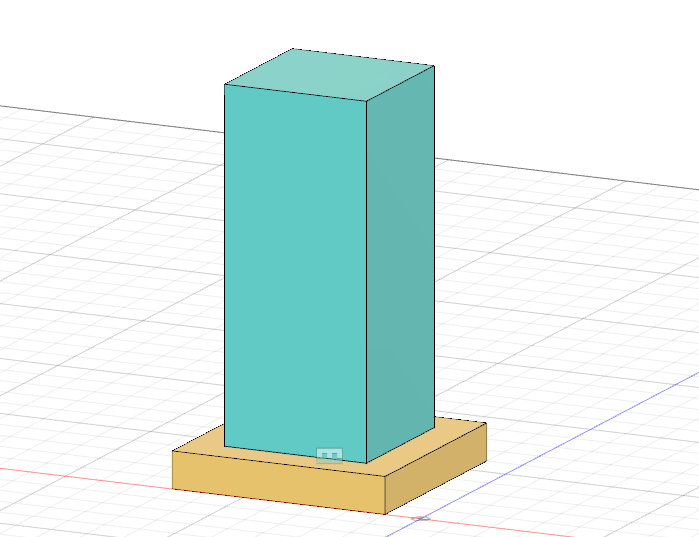
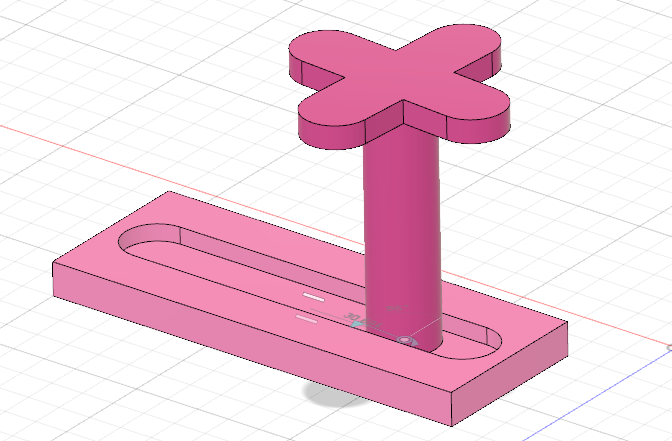
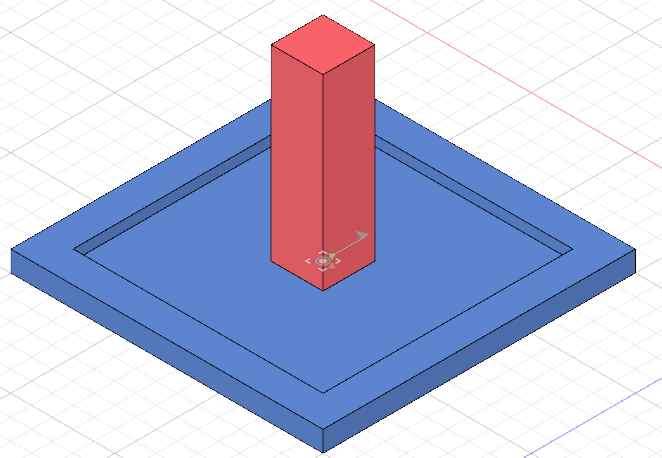
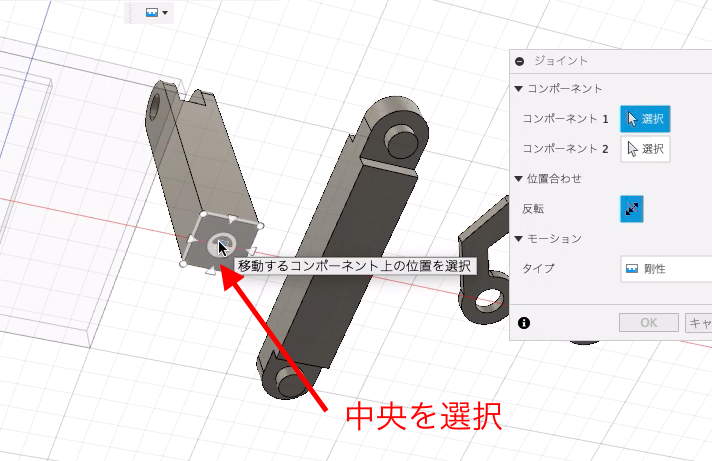
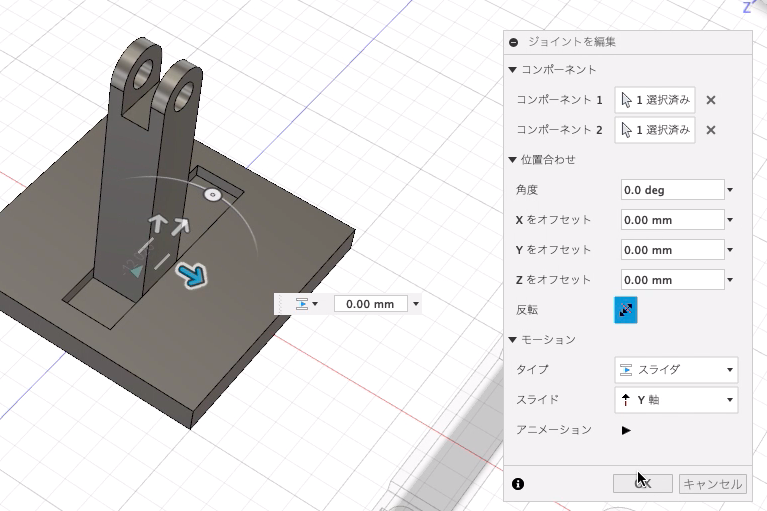
続いて、「スライダ」を用いて土台とアームを繋げます。まず、「アセンブリ」→「ジョイント」を選択。次に、「コンポーネント1」に下に示したアーム底面の中央を選択します。選択する場所を誤るとモーションが正常におこなわれないので注意しましょう。
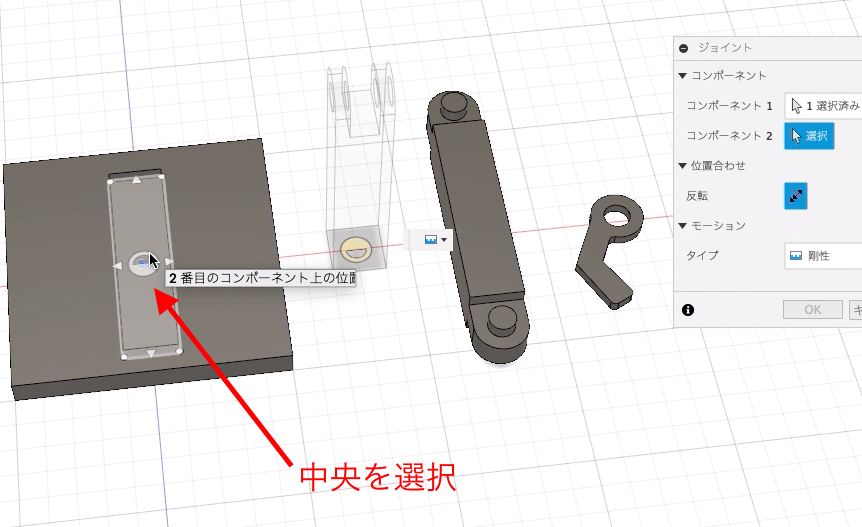
さらに、「コンポーネント2」に土台の凹んだ部分の中央を選択します。すると、「コンポーネント1」が「コンポーネント2」に組み合わされます。ジョイントのコンポーネントを選択する際には選択の順序も重要です。
最後に、モーションの「タイプ」を「スライダ」に変更し、「スライド」に「y軸」を選択します。「アニメーション」をクリックすれば、コンポーネントの動作を確認可能です。アニメーションを利用して、溝にそってコンポーネントがスライドしているか確認しましょう。正しい動作が確認できたら、OKをクリックしジョイントを終了します。
アセンブリには「ジョイント」の他に「位置固定ジョイント」がありますが、機能はほとんど同じです。コンポーネント同士が離れている場合は「ジョイント」を用い、コンポーネント同士があらかじめ組み合わさっており、くっついている場合は「位置固定ジョイント」を用います。
「回転」でアーム同士を固定しよう
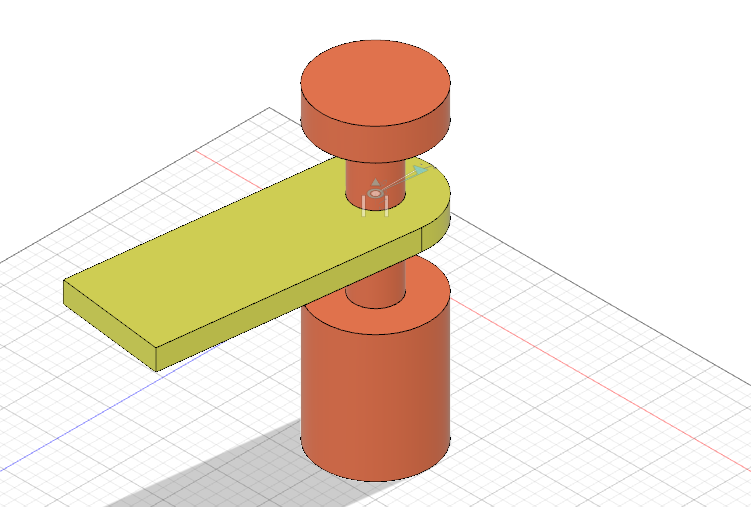
「回転」のモーションを用いて、アームを固定します。まず、先ほどと同様に「アセンブリ」→「ジョイント」を選択。「コンポーネント1」に下に示した凸部根元のエッジを選択します。

次に、「コンポーネント2」下に示したエッジ内側を選択します。
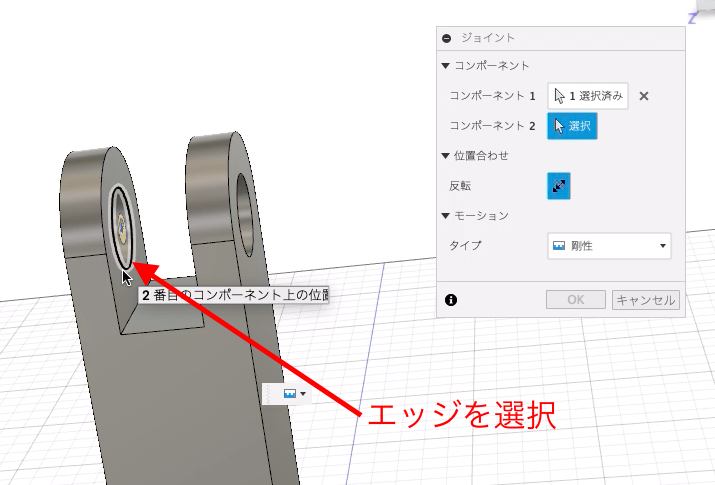
コンポーネントの選択が完了すると、「コンポーネント1」が「コンポーネント2」に組み合わさります。正しく組み合わさらない場合は「位置合わせ」→「反転」をクリックし調整しましょう。
続いて、モーションを設定します。「タイプ」に「回転」を選択し、回転軸に「z軸」を選択します。ここで選択した軸周りにコンポーネントが回転します。「アニメーション」をクリックし、正しく動作するか確認しましょう。正しい動作が確認できたらOKをクリックしジョイントを終了します。
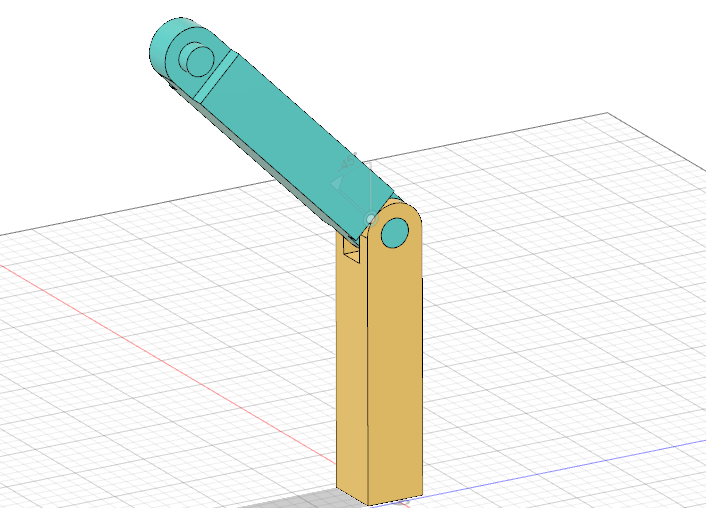
「回転」でアームの先端を取り付けよう
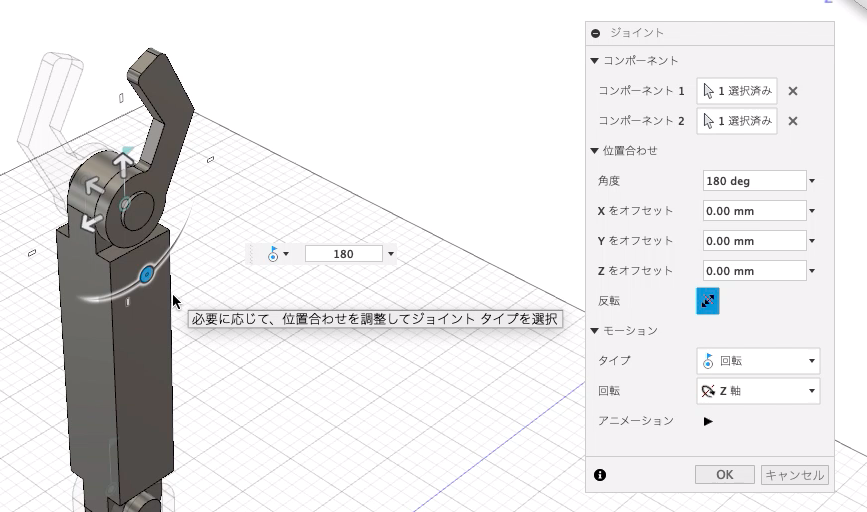
最後に、「回転」でアームの先端を取り付けます。「アセンブリ」→「ジョイント」を選択。「コンポーネント1」にアーム先端のエッジを選択します。

「コンポーネント2」にアーム凸部の根元にあるエッジを選択します。
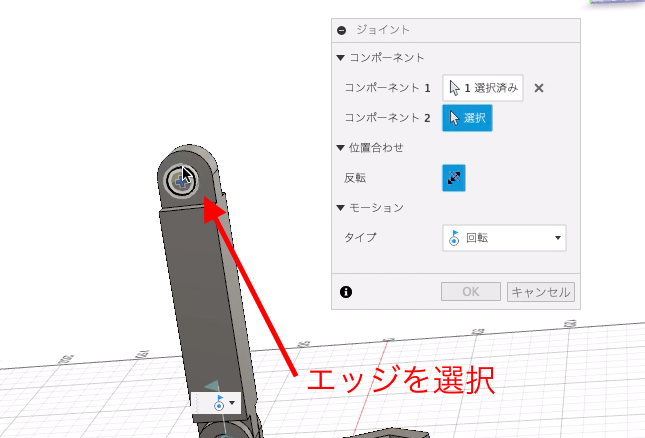
コンポーネントの選択が完了すると「コンポーネント1」が「コンポーネント2」に組み合わさります。正しく組み合わさらない場合は「位置合わせ」→「反転」をクリックし調整しましょう。
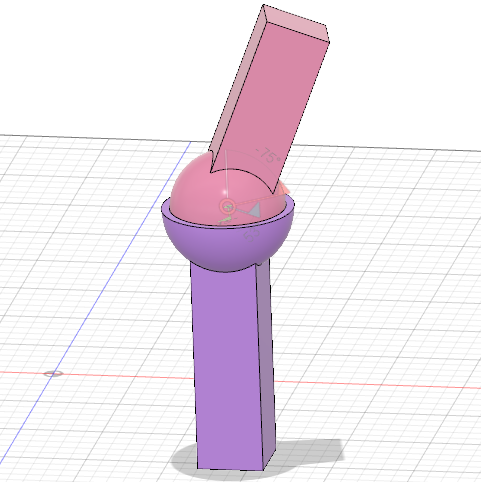
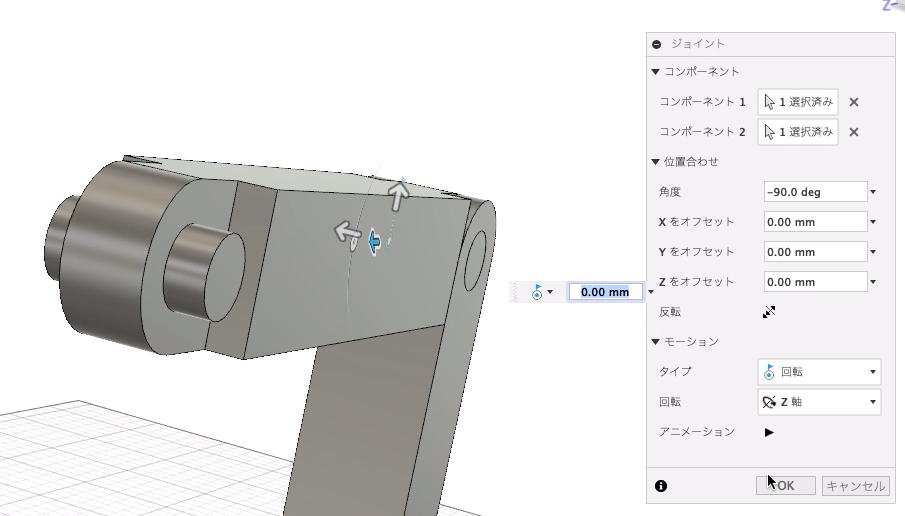
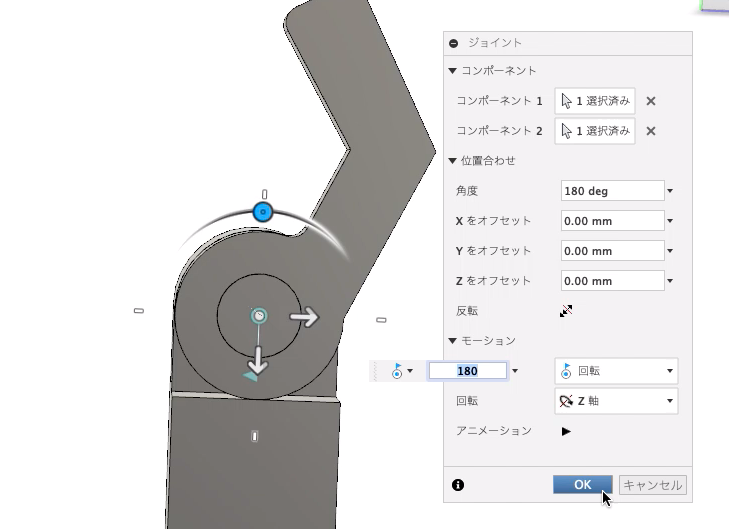
続いて、モーションを設定します。「タイプ」に「回転」を選択し、回転軸に「z軸」を選択します。ここで選択した軸周りにコンポーネントが回転します。「アニメーション」をクリックし、正しく動作するか確認しましょう。
「位置合わせ」ではコンポーネントの初期位置を設定できます。今回は、「角度」を「180 deg」とし、180度回転して状態を初期位置としました。正しい動作が確認できたらOKをクリックしジョイントを終了します。
反対側も同様にして取り付けましょう。操作はほとんど同じなので説明は省略します。
ジョイントの移動範囲を制限して実際に動かしてみよう
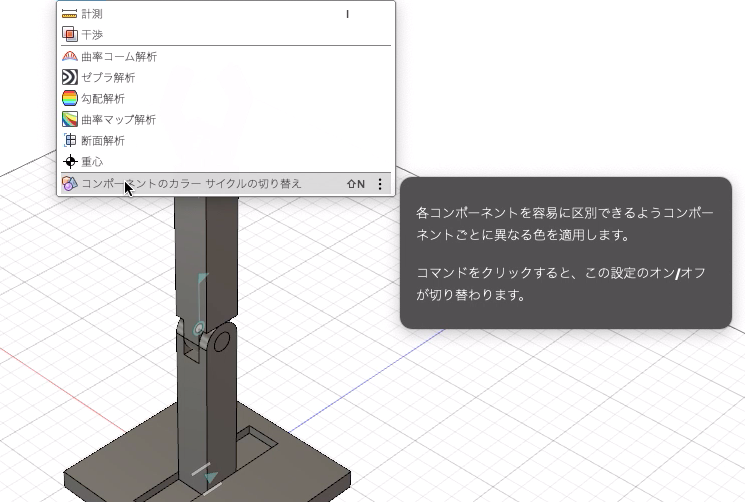
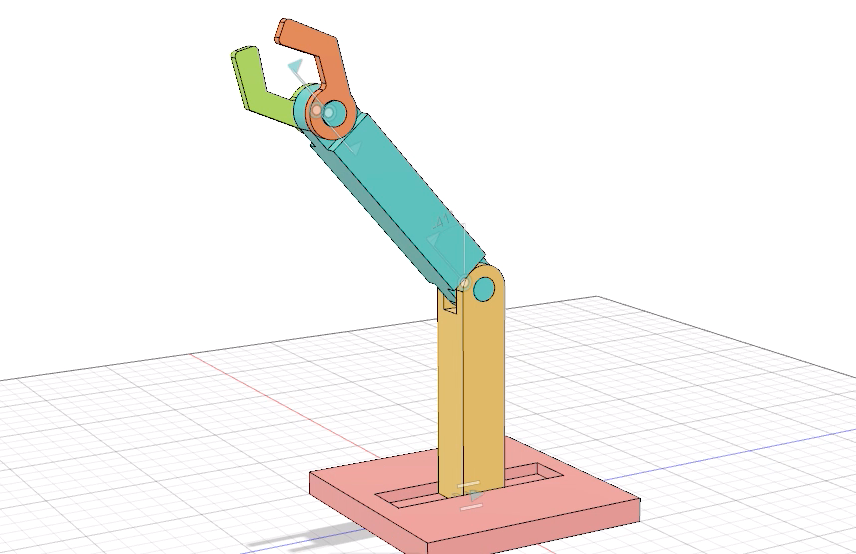
すべてのコンポーネントが組み合わさったので、実際にコンポーネントを動かしてみましょう。はじめに、見やすくするためにコンポーネントに色をつけましょう。「外観」を利用しても彩色可能ですが、「検査」→「コンポーネントのカラーサイクルの切り替え」を利用すれば、すべてのコンポーネントに自動で色を振り分けられます。
続いて、実際にコンポーネントを動かすための準備をします。今の状態でもコンポーネントを動かせますが、ジョイントの可動域を指定していないので干渉を無視してどこまでも動いてしまいます。
左側に表示されている「ジョイント」のジョイント名を右クリックし、「ジョイントの制限を編集」を選択すれば、ジョイントの可動域を指定可能です。
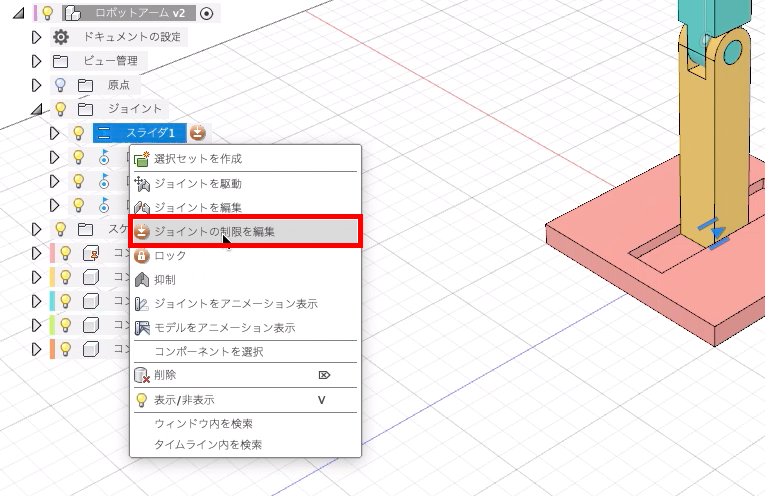
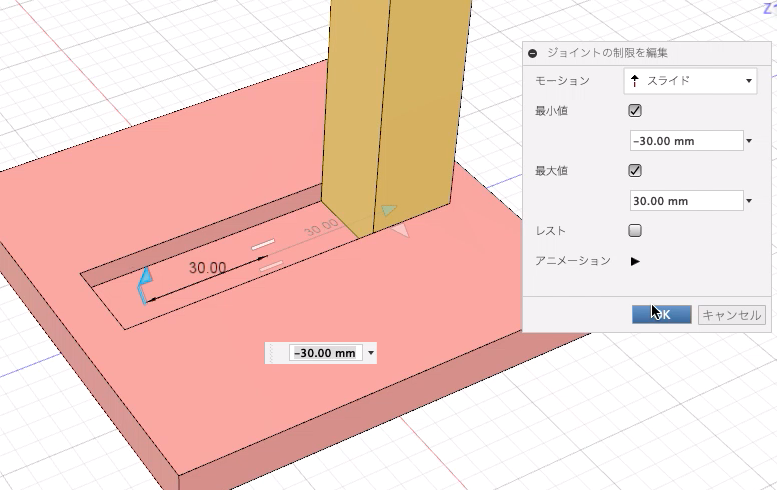
まず、土台部分のスライダの可動域を指定しましょう。左側に表示されているジョイント一覧から「スライダ1」を右クリックし、「ジョイントの制限を編集」を選択。今回は、溝の範囲だけでコンポーネントが移動するように、「最小値」に「-30mm」、「最大値」に「30mm」を入力します。
このとき、ジョイントの編集時と同じように、「アニメーション」をクリックすればモーションを確認可能です。正しい動作が確認できたらOKをクリックし、編集を終了します。
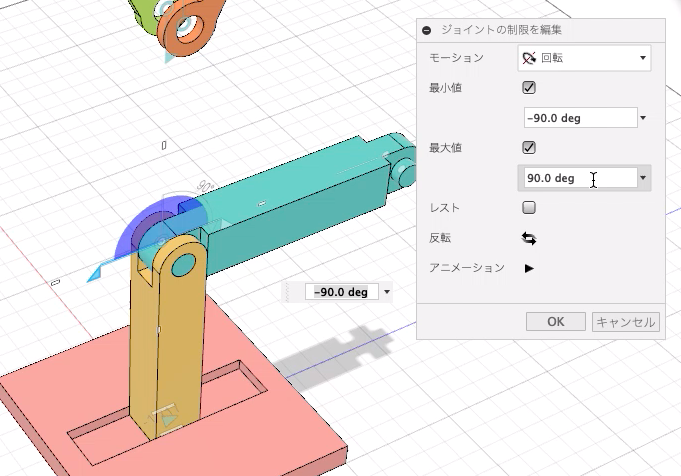
さらに、アーム部分のジョイントも編集しましょう。先ほどと同様にアーム部分に適用されているジョイント名を右クリックし、「ジョイントの制限を編集」を選択。コンポーネント同士が干渉しないように「最小値」に「-90 deg」を入力、「最大値」に「90 deg」を入力します。このとき、基本姿勢によって角度の値が異なる場合がありますが、その時は干渉しないように値を指定してください。
正しい動作が確認できたらOKをクリックし編集を終了します。
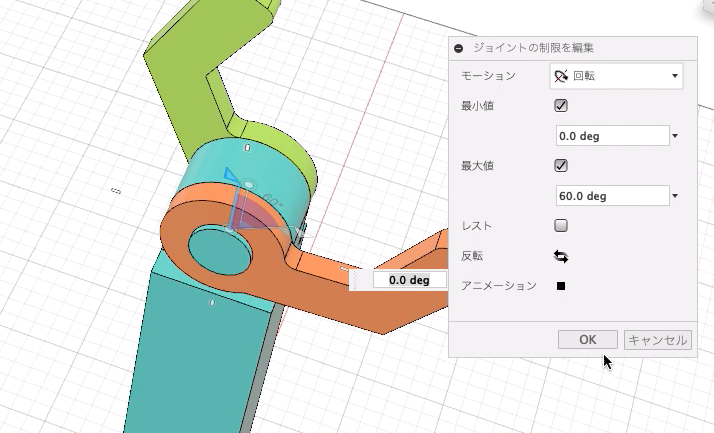
最後に、アーム先端のジョイントを編集します。先程と同様に、左側に表示されているジョイントから「ジョイントの制限を編集」を選択。「最小値」に「0 deg」を入力、「最大値」に「60 deg」を入力します。
正しい動作が確認できたらOKをクリックし編集を終了します。反対側のアーム先端も同様にしてジョイントの編集可能です。
以上で、作成したコンポーネントを自由に動かせるようになりました。
おわりに
最後までご覧いただきありがとうございます。ジョイントは必要な操作が多く、慣れるまでは大変ですが、作成したボディを実際に動かせる面白いコマンドです。ジョイントをマスターして、さらに楽しく3Dモデリングをおこないましょう。
私たちは、3Dモデルの制作・活用に特化した3Dコンテンツ制作パートナーです。仕様策定・デザイン・3Dモデリング・開発・運用環境構築まで、親身に伴走します。

3Dプリントが3日で届くサービス『3Dayプリンター』も展開しています。3Dモデリングから3Dプリント・塗装など後加工までサポートします。